
CAPE ST. GEORGE


2017 ist nach langem wieder einmal ein interessanter Bausatz auf den Markt gekommen, der von Art, Grösse und Massstab in mein zukünftiges Konzept passt.
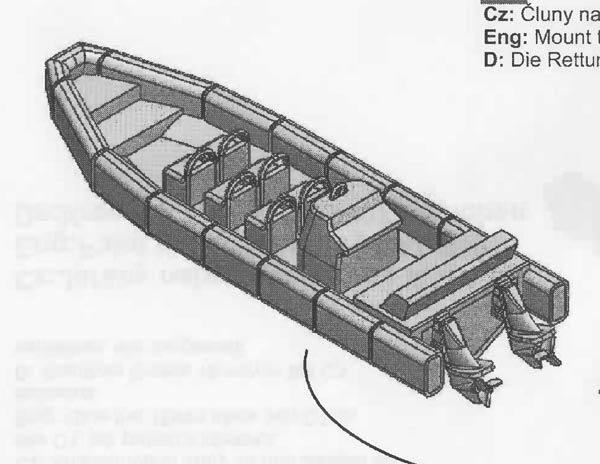
Das Vorbild zum Modell der CAPE ST. GEORGE entstammt einem Boot der „Cape Class“. Dabei handelt es sich um einen Schiffstyp, der seit 2013 von der australischen Austal-Werft in Henderson gebaut wird und ein wichtiges Instrument der Sicherung der lokalen Küstengewässer ist. Von Beginn an war der Bau von zehn Einheiten geplant, die zum einen in der Royal Australian Navy und zum anderen in der Australian Border Force ihren Dienst verrichten.
(Auszug aus dem Baubericht der Zeitschrift "Schiffsmodell")
Das Modell ist im Massstab 1:48 und damit rund 1,2 Meter lang und wird ca. 6-7 kg schwer, somit noch gut transportierbar.
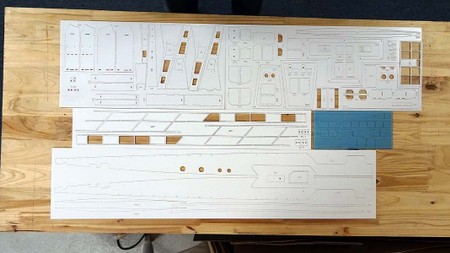
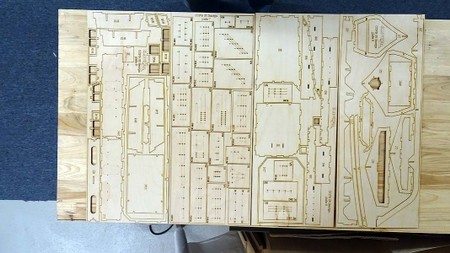
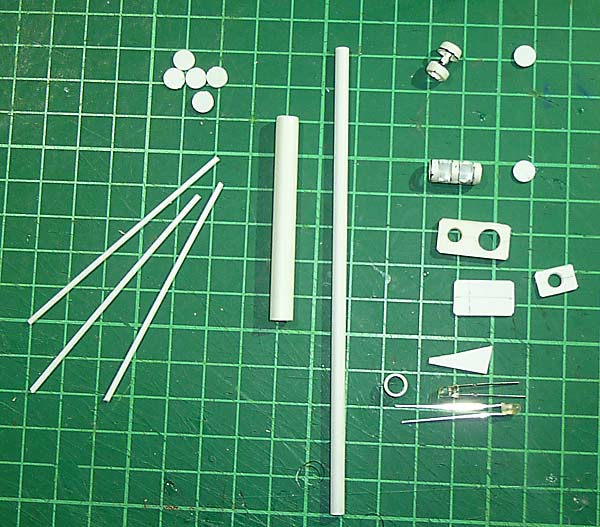
„UNBOXING“
Der Bausatz enthält nebst dem tiefgezogenen Rumpf viele sauber geschnittene, gefräste oder gelaserte Teile aus Sperrholz und Kunststoff. Im Weiteren sind viele 3D-gedruckte Teile vorhanden sowie die Wellen, Propeller, Kupplungen und Ruder.


Der Bau beginnt
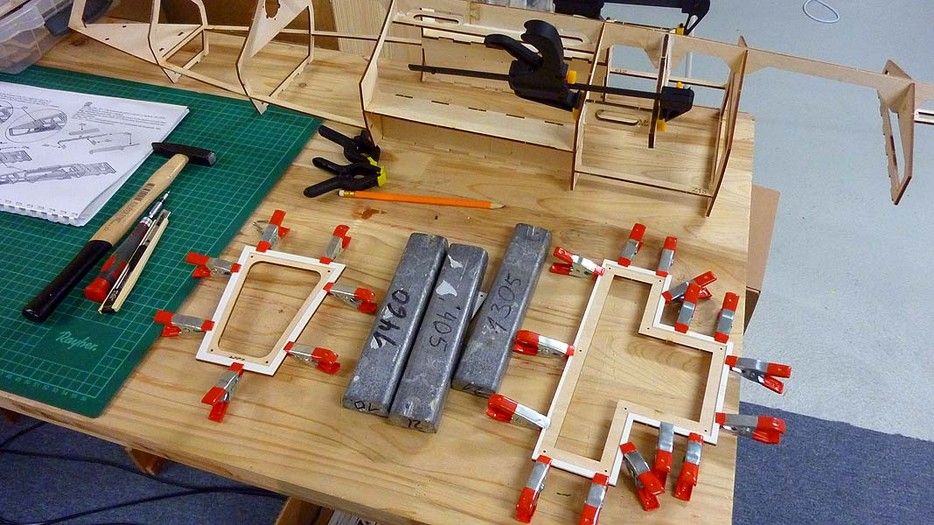
Die Konstruktion ist etwas speziell, zur Stabilisierung des Rumpfs dient ein Gerüst aus Sperrholz, das in die Rumpfschale eingeklebt werden muss. Allerdings muss man da einiges beachten, das unbedingt vor dem Einkleben erledigt werden muss. Einiges muss vor dem Einbau schon mit Farbe gestrichen werden, da man später kaum noch Zugang hat.

Und noch etwas ist zu Beachten: der Bausatz sieht an Funktionen lediglich die Antriebsmotoren, die Ruder und das Querstromruder vor. Das ist für mich etwas wenig für ein so grosses Modell. Mindestens diverse Beleuchtungen und drehende Radarbalken sollten schon sein. Das muss aber alles vorher genau bedacht werden, da ein nachträglicher Einbau im Bereich unter dem Deck kaum noch möglich ist.
Die Bauanleitung ist als Heft mit Zusammenbauzeichnungen gehalten und recht gut verständlich, allerdings fehlen einige Hinweise, z.B. dass gewisse Teile in Gehrung geschliffen werden müssen. Es empfiehlt sich auf jeden Fall, die Sperrholzteile vor dem Verleimen nur zusammenzustecken. Es gibt spiegelgleiche Bauteile die man im Eifer des Bauens schnell gleich zusammensetzt und erst beim Zusammenbau mit dem Gerüst den Fehler bemerkt (… und ja, ich spreche aus leidvoller Erfahrung!).

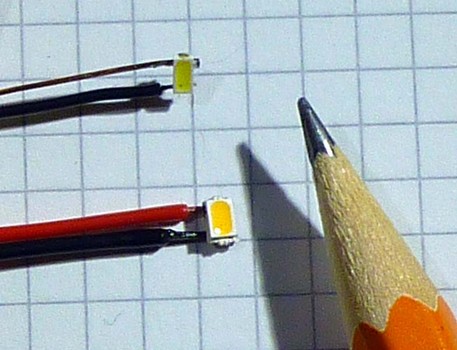
Nun habe ich mit den ersten Zusatzfunktionen begonnen. Für die Innenbeleuchtung habe ich auf Grund des Massstabes SMD LED’s genommen, das Anlöten der Leiter an die ca. 1x2mm kleinen Dinger ist allerdings reine Nervensache. Diese LED’s kommen in den Seitennischen und auf der Brücke zum Einsatz.

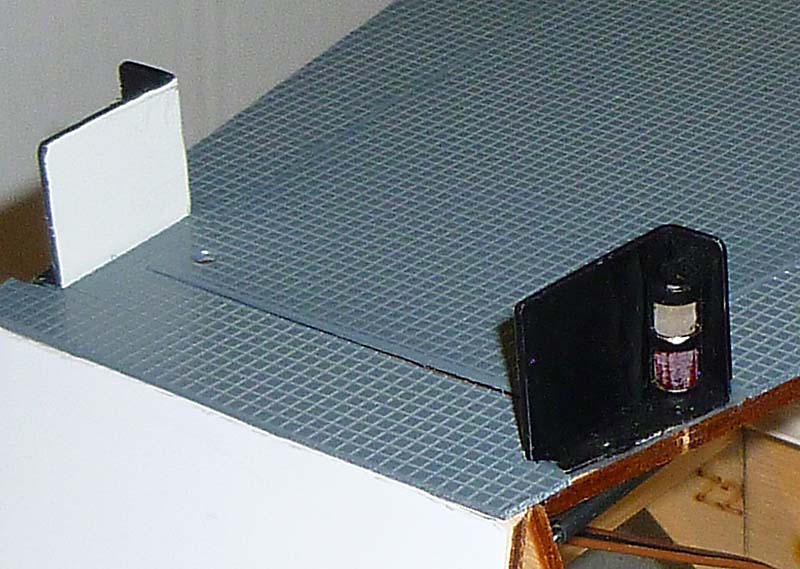
Da die Fenster der Brücke im Bausatz transparent sind finde ich, dass damit auch mindestens eine minimale „Möblierung“ des Kommandostandes angebracht wäre. Auf dem Peildeck bieten sich ein Scheinwerfer und ein Radar zur Elektrifizierung an. Da erfahrungsgemäss bei solchen Installationen im kleinen Massstab die Gefahr von Ausfällen und Defekten gross ist, baue ich die Brücke modular und demontierbar, so dass spätere Reparaturen möglich sind. Das hat sich bereits jetzt bezahlt gemacht, die erste Version des Scheinwerfers funktionierte nach dem Einbau nicht mehr, so habe ich einen neuen, etwas robusteren gebaut, der hoffentlich länger hält.
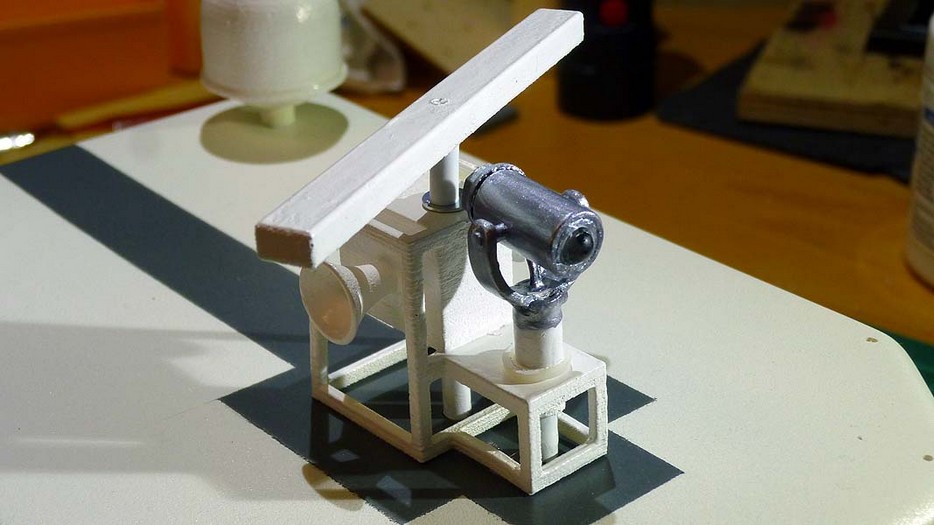
Der neue Scheinwerfer, beleucht- und drehbar, der Radarbalken dreht sich auch
Das Peildeck ist zusammen mit der Kommandobrücke als Modul gebaut das sich in den Aufbau einsetzen lässt und mit Drehverschluss gesichert wird.



Die Antriebseinheit für den Radar und Scheinwerfer unter dem Peildeck ist noch zu gross und muss überarbeitet werden, sonst hat die Mannschaft im Kommandostand zu wenig Platz ;-))
Der Quality-Manager war mit der ersten Version des Kommandostandes nicht zufrieden.

Daher ist nun Version 2 in Arbeit!

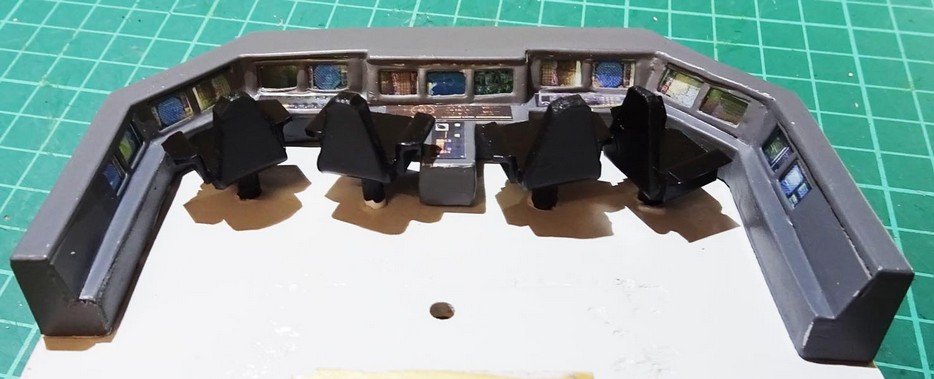
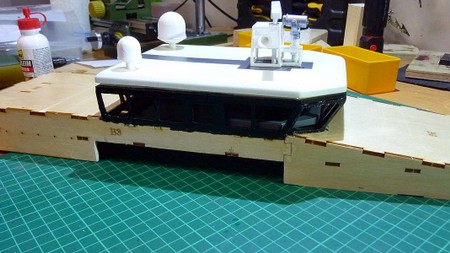
Kommandostand ist bereit, fehlt nur noch das Personal

Wenn’s eingebaut ist sieht man nicht mehr viel davon!
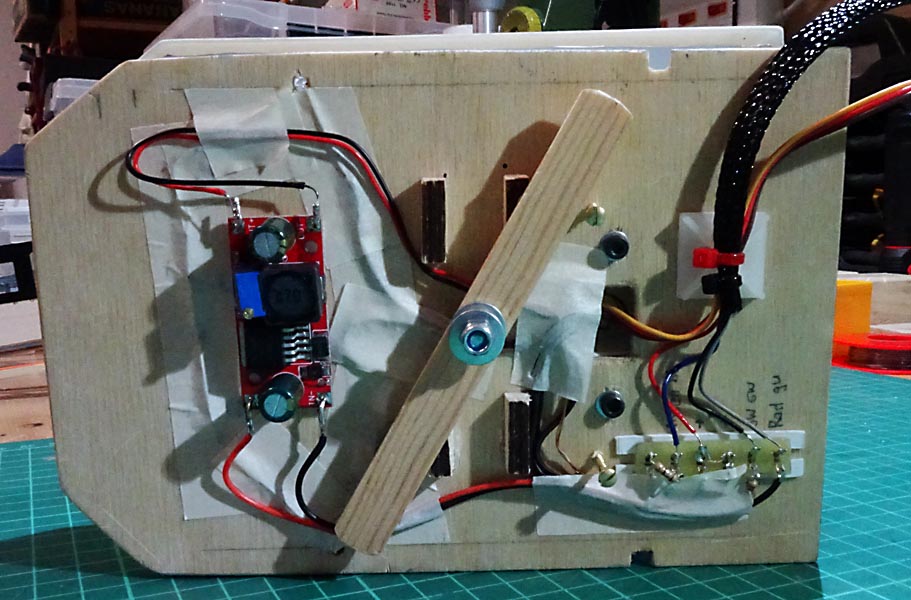
Für den Radarmotor musste ich einen DC-Wandler einsetzen, nur mit Vorwiderstand ist der Motor nicht angelaufen (12V Steuerspannung und 2V am Motor).

Fertig zusammengebaut
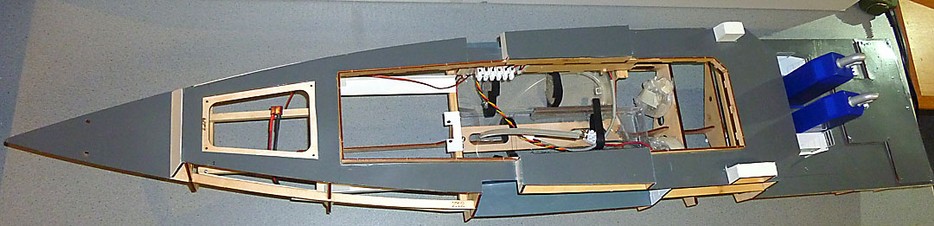
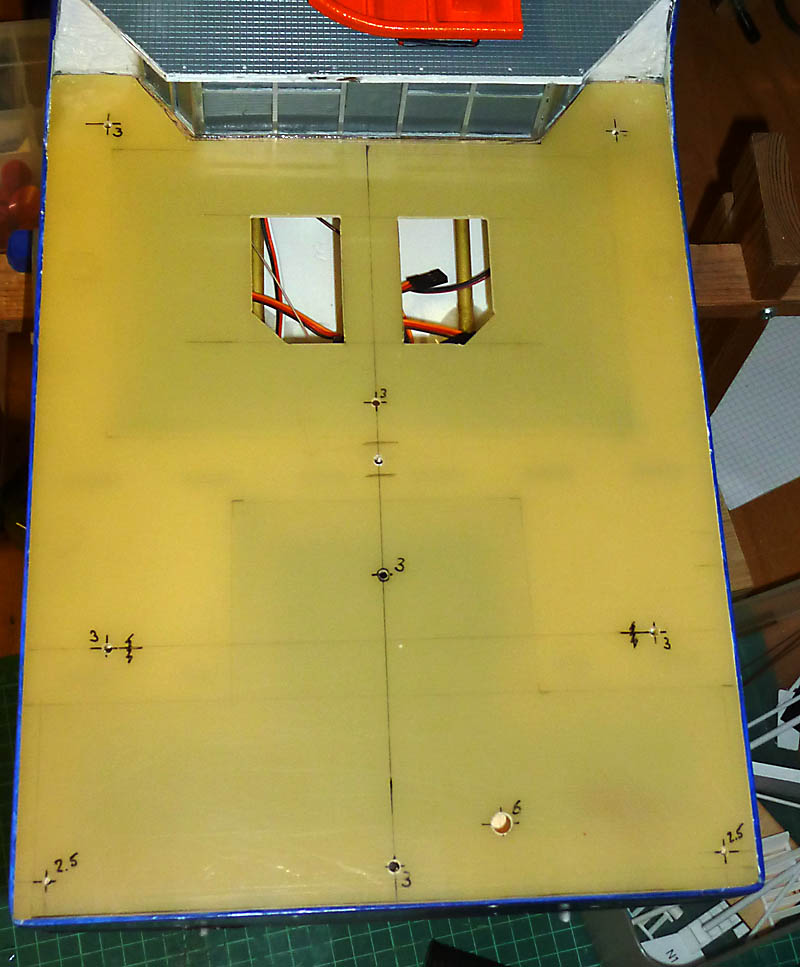
Wenn das Holzgerüst mit dem Rumpf verklebt ist wird es sehr eng mit der Zugänglichkeit. Daher will ich zuerst die ganze Elektrik bauen und möglichst so verbauen, dass die Hauptkomponenten auf entnehmbaren Platten montiert sind und über Stecker mit den fest verbauten Teilen verbunden sind.
Als Erstes die Antriebsplatte.
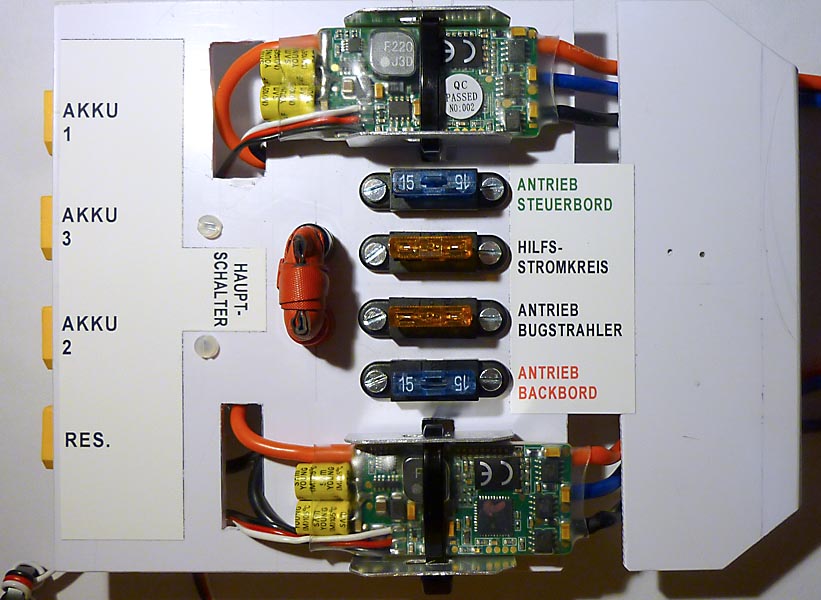
Die 3 Akkus sind direkt parallel geschaltet und über einen Kurzschlussbügel auf die Sicherungen verbunden.
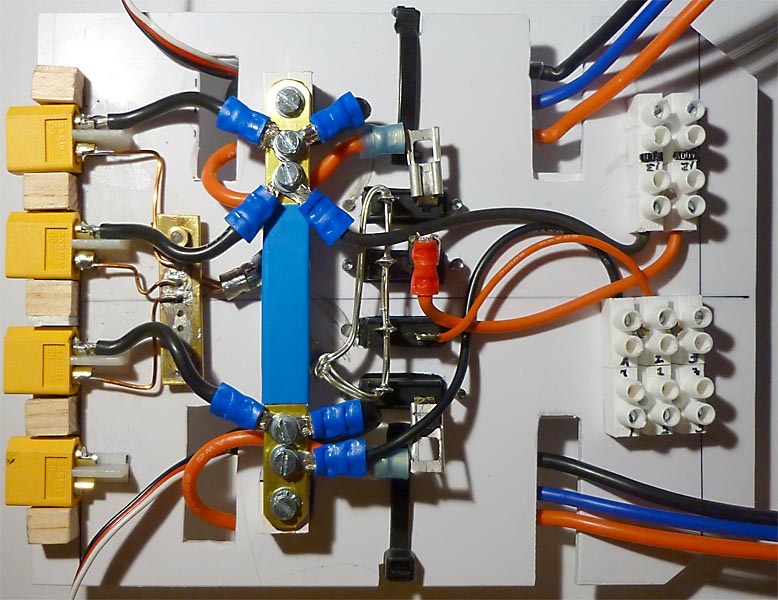
Unterseite der Platte

Die Platine liegt direkt über den Motoren.
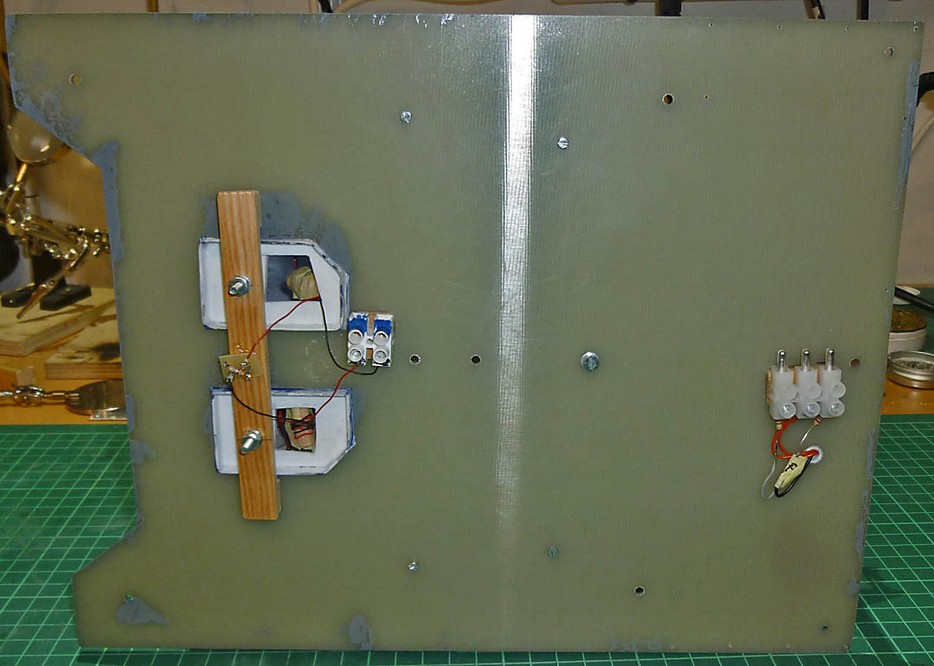
Als nächstes folgt die Platte mit dem Empfänger und Schaltmodul.
Es kommt eine auf 2.4G umgebaute Futaba F14 zum Einsatz. Der Umbau war überraschend einfach mit einem Ripmax-Modul. Hauptgrund war, dass die vorhandenen Schaltmodule auch mit 2.4G funktionieren. Das Gehäuse noch neu gespritzt und schon bin ich auch (fast) in der „Neuzeit“ angekommen. Ist schon bequem, wenn man sich nicht mehr um die Frequenzen kümmern muss.

Natürlich ist die nicht zu vergleichen mit einer modernen 2.4G Anlage, insbesondere gibt es da senderseitig keine Mixer oder Kennlinienanpassung. Schön wäre es, wenn es irgendwo einen empfängerseitigen Mixer gibt mit dem man bei 2-motorigen Modellen die Motoren mit dem Rudersignal mixen könnte, aber bis jetzt habe ich einen solchen nur für Bürstenmotoren gesehen.
Und wie’s so geht, jetzt habe ich beim rumgoogeln so einen Mischer gefunden, und erst noch überraschend günstig. Bin gespannt, ob der auch so wie erhofft funktioniert.

Nun kommen weitere Aufbauteile in Arbeit, den Hauptmast möchte ich natürlich mit funktionierender Beleuchtung und Radar bauen und bei den Kaminen sollen noch Scheinwerfer dran wie in Original. Mast und Kamine werden wieder demontierbar geplant, da sie mit Elektrik bestückt sind.
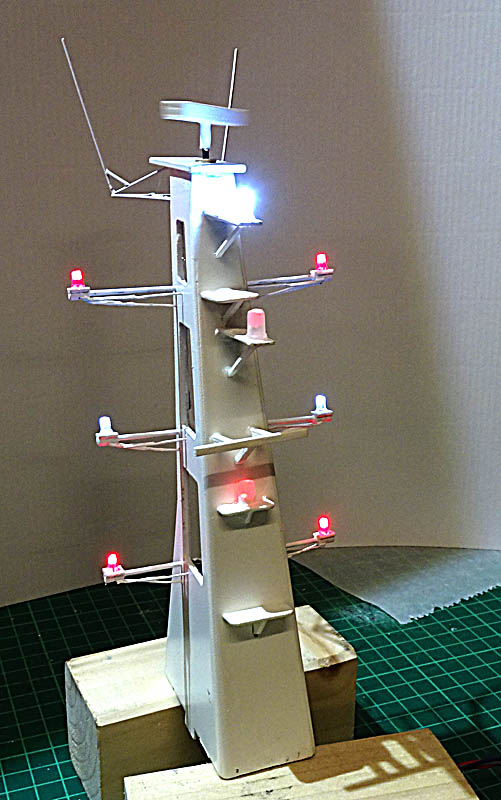
Der Mast ist mit den folgenden, einzeln schaltbaren Funktionen ausgerüstet:
- Radar
- Toplicht weiss
- Lichter „manövrierbehindert“, rot-weiss-rot, beidseitig
- 2 weitere Lichter deren Funktion ich noch nicht herausgefunden habe!
Allerdings habe ich beim Vergleich mit dem Original doch ziemliche Abweichungen gefunden und jetzt schon beschlossen, den Mast später neu zu bauen. Aber zuerst soll das Schiff schwimmfähig gemacht werden.
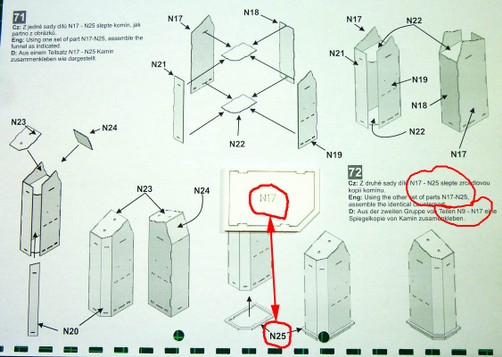
Bei den Kaminen sollen noch die Scheinwerfer wie im Original dazukommen. Bei der Bauanleitung waren die Teilenummern vertauscht und z.T. doppelt, dafür fehlte eine „Sockelleiste“ und musste von Hand angefertigt werden.

An den Kaminen wurden noch wie beim Original Scheinwerfer angebracht (natürlich funktionierende).
Das Brückenmodul ist fertiggestellt.


Da mich das dem Bausatz beiliegende Querstrahlruder nicht überzeugte werde ich ein Rabösch QSR einbauen. Dazu musste ich aber am Gerüst ein Stück des Kiels entfernen. Zur Verstärkung habe ich eine zusätzliche Stabilisierung zwischen den 2 Spanten eingebaut.
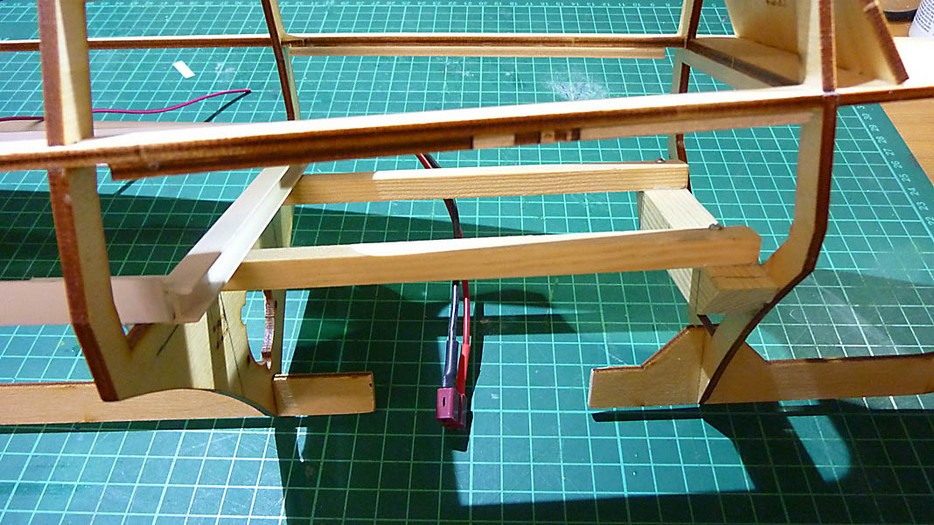
Für eventuelle spätere Ausbauten (z.B. Kran, Davits, etc.) habe ich auch noch eine zusätzliche Öffnung im hinteren Bereich ausgeschnitten, da sobald das Gerüst eingeklebt ist ein Zugang sehr schwierig wäre.
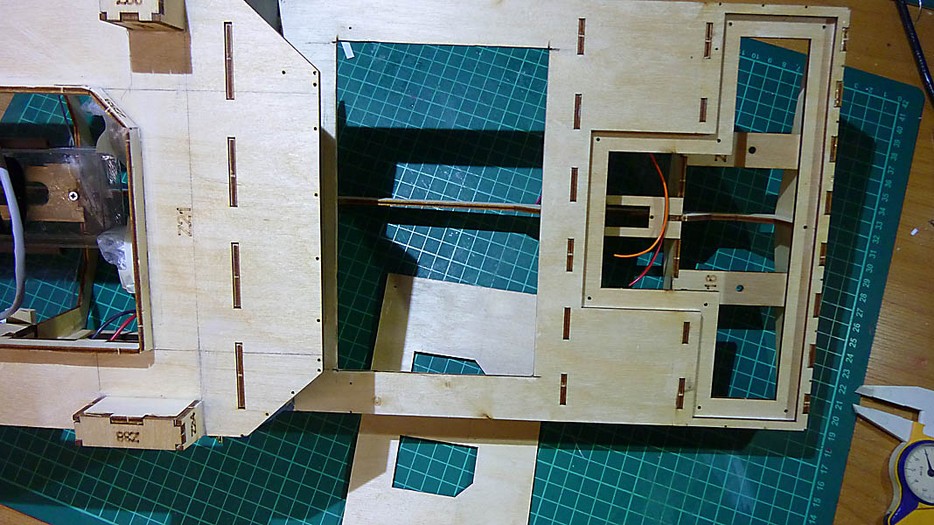
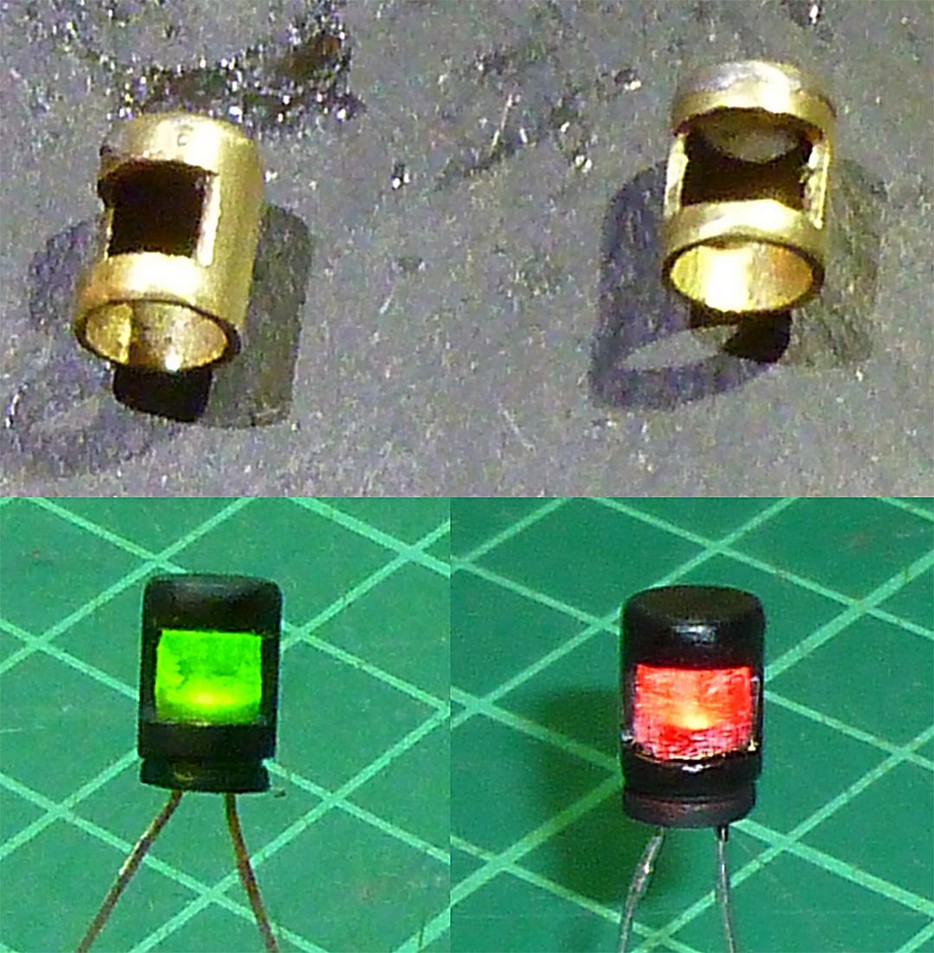
Weitere Details, Positionslampen, die im Bausatz komplett fehlen.
Das Gerüst ist bald bereit zum Einkleben in die Rumpfschale, aber zuerst muss dort noch das Querstrahlruder eingeklebt und die zu grosse Öffnung für das Original-QSR geschlossen werden.
Da habe ich gerade festgestellt, dass für die Positionslampen ja „2-stöckige“ Lampen richtig wären, also gleich umgesetzt und montiert.
Nun wurde das Querstromruder eingebaut, die grosse Öffnung des Originals habe ich mit einem Einsatz geschlossen, damit ich nicht alles mit Stabilit „zukleistern“ musste.

Die Ankertaschen habe ich in Messing gebaut, da später ev. funktionierende Anker vorgesehen sind.

Dann standen die ersten grösseren Spachtel- und Schleifarbeiten an für die nötige Anpassung der Rumpfform. Der erste Versuch mit einem 1-komponenten Leichtspachtel ist fehlgeschlagen, dann habe ich ein 2-komponenten Polyesterspachtel genommen. Trotzdem musste ich 5-6 mal spachteln und schleifen bis das Resultat endlich akzeptabel war (hoffe ich zumindest).

Für etwas Abwechslung zwischen dem Spachteln und Schleifen habe ich mit dem Bau weiterer Aufbauten begonnen.
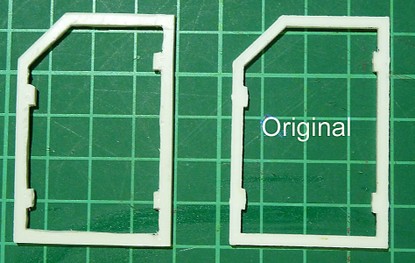
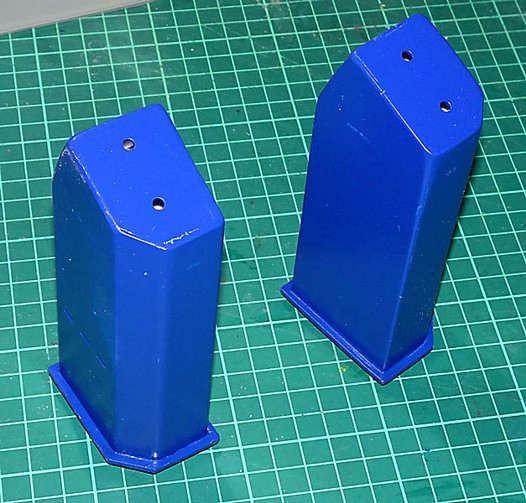
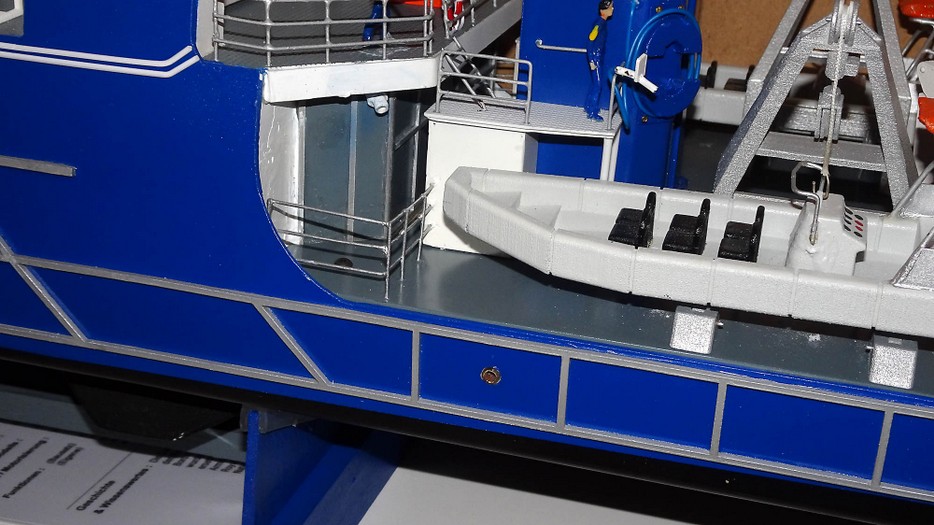
Die Lifeboote sind etwas sehr einfach gehalten.

Mindestens der dominante Bügel sollte schon vorhanden sein.

So gefallen die mir schon besser.
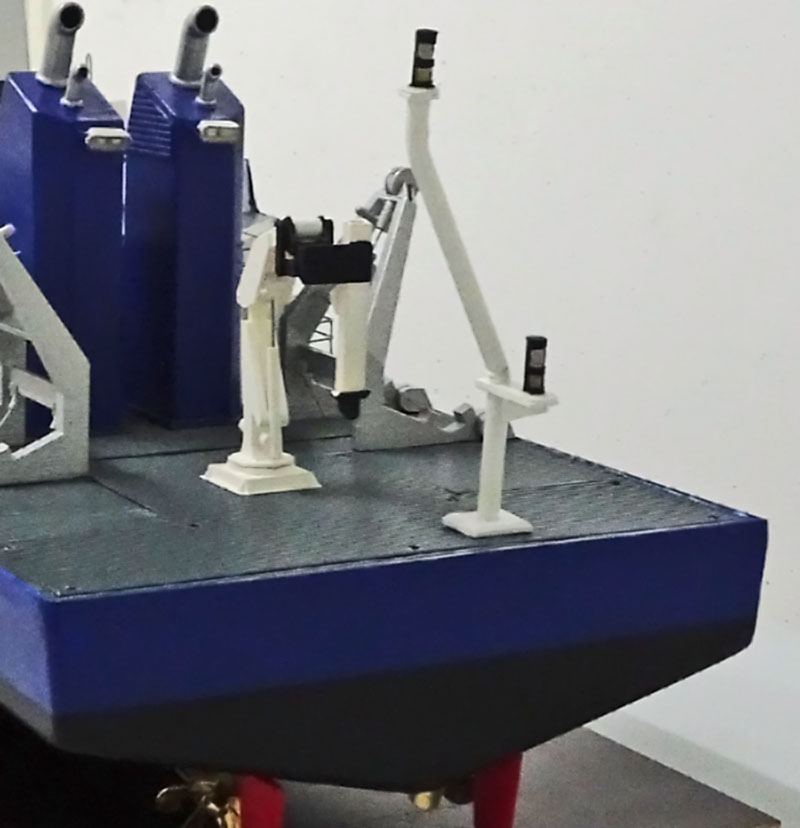
Vorne und hinten auf dem Deck ist noch je ein Signalmast.
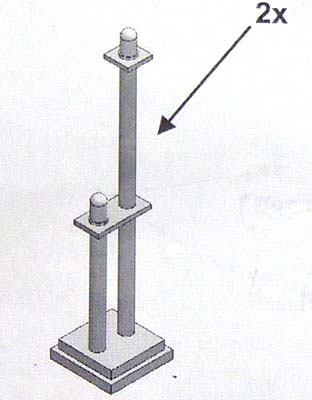
Nach Anleitung sind die ebenfalls sehr schlicht gehalten.
Für meine Variante waren da ein paar Teile mehr nötig.


Und so sieht der vordere Mast dann aus, etwas näher am Original, finde ich.
Beim hinteren Mast habe ich das Problem, dass ich bisher kein gutes Foto gefunden habe, auf jeden Fall aber sieht er komplett anders aus als der vordere. Weitere Recherchen sind nötig!
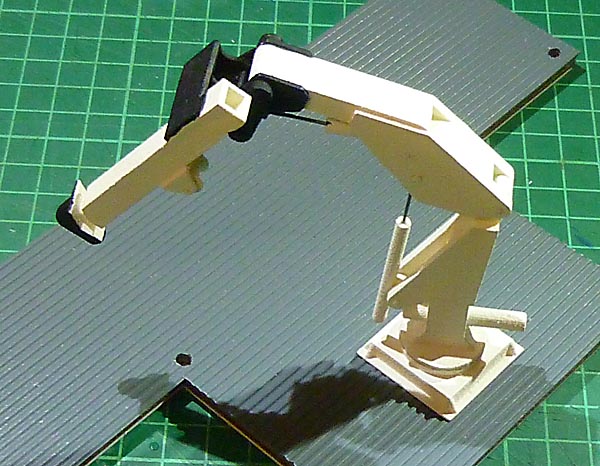
Den Kran auf dem hinteren Deck habe ich momentan in dem „einfachen“ Zustand belassen. Er ist beweglich, aber ohne Antrieb.
Fleissig gegoogelt und doch noch aus einem Video eine ungefähre Ansicht des hinteren Signalmast gefunden und im Rahmen meiner bescheidenen Möglichkeiten und Talenten so gut möglich umgesetzt.
Jetzt geht’s einen entscheidenden Schritt weiter, die „Hochzeit“ hat stattgefunden!
Das Gerüst wird in die Rumpfschale eingeklebt und mit Spannriemen fixiert, damit es auch satt an der Schale anliegt.

Jetzt müssen die Seitenteile zur Vervollständigung des Rumpfs angebracht werden, eine heikle Angelegenheit, wie ich feststellen musste.

Und dann beginnt wieder spachteln, schleifen, spachteln, schleifen, …..
Die Nahtstelle zwischen Rumpfschale und der aufgesetzten Bordwand hat mich an den Rand der Verzweiflung gebracht!
Auf einem Bild des aufgedockten Schiffes habe ich festgestellt dass da noch Schlingerkiele vorhanden sind sowie offenbar auch aktive Stabilisierruder. Die Kiele habe ich nachgebaut, aktive Ruder habe ich im Moment noch nicht vorgesehen. Mal schauen wie sich das Modell im Wasser verhält.

Nun kann der Rumpf lackiert werden, was allerdings umfangreiche Abdeckarbeiten zur Folge hatte, insbesondere bei den bereits bemalten Nischen beidseits in der Bordwand. Erst mal habe ich nur das Unterschiff in schwarz und den übrigen Rumpf in marineblau gespritzt (mittels Spraydosen, Acryllack).

Wenn die Testfahrten zufriedenstellend verlaufen folgt die weitere Bemalung und Montage des ganzen „Zierrates“ wie Scheuerleisten und Markierungen sowie auch die ganzen Ausrüstungen auf den Decks.
Anlässlich des Schaufahrens des ASK in Wohlen Anfang Mai konnte ich erste Testfahrten im Schwimmbecken durchführen. Es sind einige Optimierungen notwendig, vor allem in Sachen Abdichtung ist noch einiger Aufwand gefragt. Bei schneller Fahrt, speziell in den Kurven, wird das Hinterdeck stark überschwemmt, ebenso werden die beiden Nischen bei Kurvenfahrt geflutet, und die sind definitiv nicht dicht. Andererseits sind die Fahrleistungen beeindruckend, jedoch lässt die Feinfühligkeit bei langsamer Fahrt zu wünschen übrig. Das liegt auch an der alten Funke, die leider keine Anpassung der Kennlinie zulässt. Eventuell kann ich bei den Einstellungen der Regler noch etwas herausholen oder sonst - unter Inkaufnahme geringerer Spitzengeschwindigkeit – kleinere Schrauben montieren.
Als erste Massnahme war das Abdichten der gesamten Struktur von innen eine recht fummelige Angelegenheit, zu einem schönen Teil „über Kopf“ und mit Spiegel, womit ich doch ziemliche Koordinationsprobleme hatte! Ich habe Epoxy mit reichlich Verdickungsmittel verwendet, damit das auch an Ort bleibt und nicht davonläuft. Durch diese Arbeiten wurde auch die Lackierung in Mitleidenschaft gezogen, so dass ich später den Rumpf und diverse Aufbauten neu lackieren muss.
Dann habe ich mich entschieden, mit einer einzigen, abnehmbaren Platte aus Glasfaser-Epoxy zu machen, anstelle der 2 separaten Platten. Ich hoffe damit auf eine bessere Abdichtung und zusätzlich ergibt sich eine schönere Optik.
Um das Absenken des Hecks bei schneller Fahrt zu reduzieren, mache ich die im Bausatz vorhandenen starren Trimmklappen beweglich und werde sie mit Servos parallel zur Drehzahl ansteuern. Diese Ansteuerung ist allerdings etwas problematisch, da ich die Trimmklappen mit einer Nylonseite durch ein gebogenes Röhrchen betätigen muss. Zudem ist der Einbauplatz ziemlich eng.

Testaufbau für die Ansteuerung der Trimmklappen
Es ist ein bisschen eine „Krankheit“ von mir, dass ich während dem Bau ständig neue Ideen habe, was man noch zum Funktionieren bringen könnte, wobei dann oft das Gewicht der zusätzlichen Funktionen zu Problemen führt. Auch hier bin ich schon am Limit und werde ev. einen Akkustrang „opfern“ müssen, aber mit den verbleibenden 2 x 4000mAh bei 12V sollte sich immer noch eine ansprechende Fahrzeit ergeben. Im schlimmsten Fall besteht noch die Option auf LiPo umzusteigen.
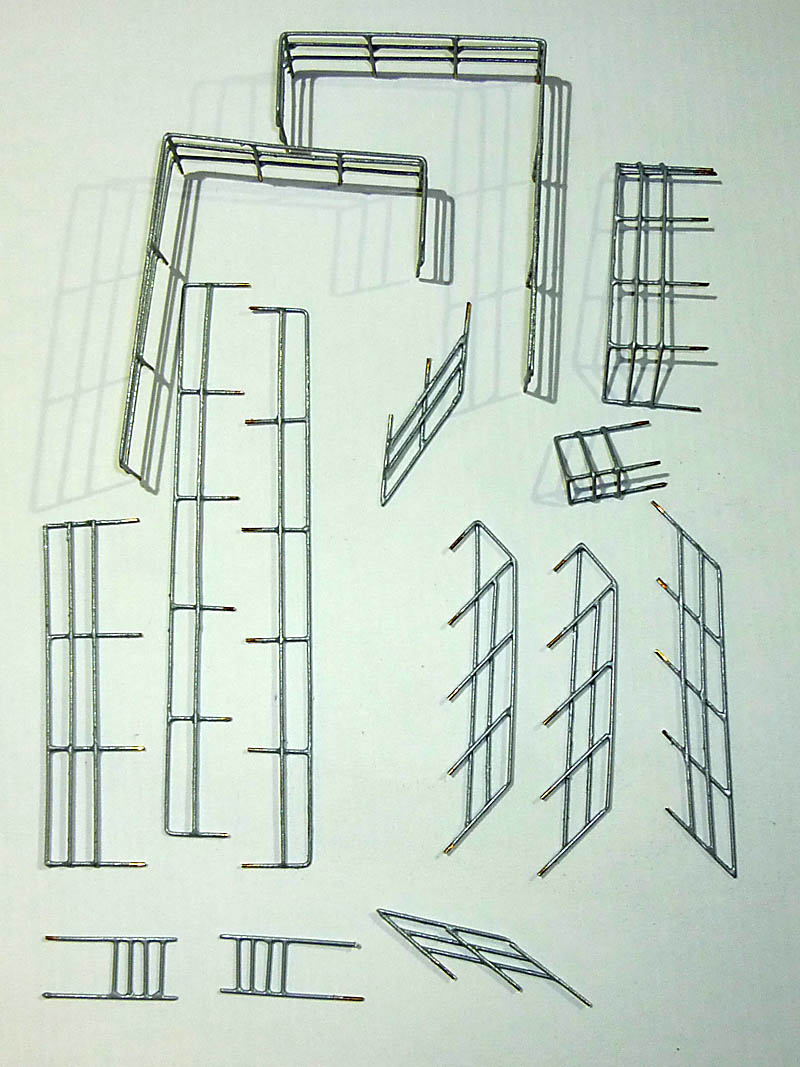
Eine weitere „Fummelarbeit“ sind noch die diversen Reling, die gelötet werden müssen.
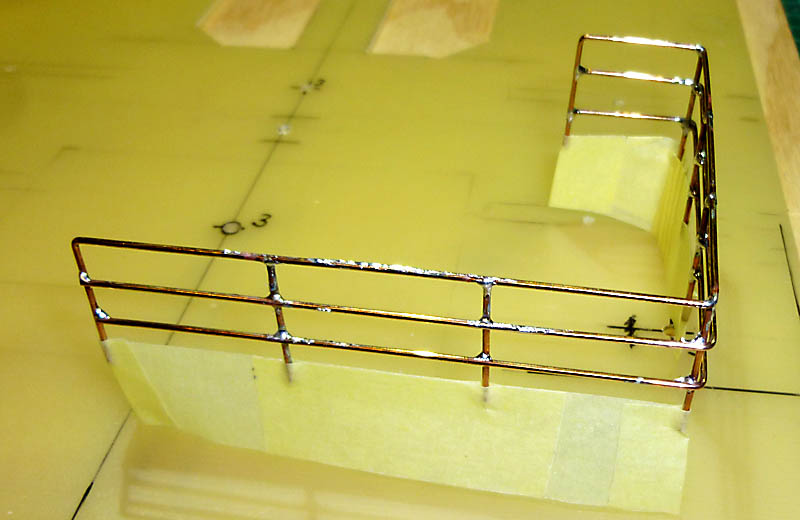
Und wieder mal entgegen der Bauvorgabe habe ich hier die zusammenhängenden Stücke der Reling in einem Stück gebaut und nicht wie vorgesehen in 3 Einzelteilen. Dies bedingt allerdings eine genaue Schablone und kann nicht mit den gelieferten Löthilfen gemacht werden.
Die hintere Deckplatte gespritzt und mit den Aufbauten bestückt, wie immer sind diese demontierbar ausgeführt.


Nach den vorangegangenen Optimierungen musste ich den Rumpf neu lackieren und gleich auch noch die roten Streifen anbringen. Dann konnten die „Verzierungen“ angebracht werden, Scheuerleisten, Dekals, etc. und die Reling wurde angebracht. Dann wurden auch noch die diversen Objekte auf den Decks montiert.





Die Mannschaft schaut sich schon mal um
Als vorläufig letztes habe ich noch einen Wasseralarm eingebaut und auf eine LED am hinteren Mast verdrahtet. Sollte es immer noch übermässig Lenzwasser geben könnte ich damit auch eine automatische Lenzpumpe ansteuern, was ich aber nicht hoffe!
Jetzt wäre die Jungfernfahrt angesagt, aber zur Zeit ist es fast unmöglich in der näheren Umgebung ein geeignetes Gewässer zu finden das nicht völlig mit Badenden überlaufen ist oder wegen Naturschutz Modellschiffe überhaupt erlaubt sind.
Nach 8 Monaten und ca. 350 h Bauzeit war es dann so weit, dass auf dem künstlichen Gewässer einer neuen Grossüberbauung bei Zürich konnte die Testfahrt stattfinden. Die „Kiste“ läuft recht gut, ist aber bei langsamer Fahrt etwas kopflastig, bei schneller Fahrt kehrt das und das Heck taucht trotz den ziemlich steil eingestellten Flaps ziemlich ab. Ich weiss noch nicht, wie ich das Problem lösen kann. Ansonsten bin ich mit der Fahrleistung sehr zufrieden.
Trotz grossem Aufwand zur Abdichtung dringt noch immer zu viel Wasser ein, so dass ich wahrscheinlich doch noch die Lenzwasserpumpe einbauen werde.
Testfahrt der Cape St. George
Nach der Testfahrt habe ich die hintere Decksplatte geöffnet und entgegen den Befürchtungen war alles trocken. Dann habe ich die seitlichen Nischen „geflutet“ und wieder konnte ich kein Eindringen von Wasser sehen. So frage ich mich, woher denn das Wasser kommt. Eigentlich bleiben da nur noch die Antriebswellen und das Querstromruder. Weitere Testfahrten werden nötig sein!
Vorsichtshalber habe ich bereits eine Lenzwasserpumpe eingebaut, ein Ansaugrohr und Schlauch hatte ich zum Glück von Anfang an eingebaut, bisher aber nur zum manuellen Abpumpen verwendet. Dank der bereits vorhandenen grossen Öffnung im Heckbereich war der Einbau zwar ein wenig fummelig, aber doch noch gut möglich. Der Auslauf ist nicht ganz gemäss Original, aber die eingeschränkte Zugänglichkeit liess nicht grossen Spielraum zu.

Ein weiteres Problem zeigte sich bei der Ansteuerung der Flaps. Die eingebauten Microservos erwiesen sich als Schrott und die Anlenkungspunkte an den Flaps sind auch nicht optimal. Da muss ich noch mal über die Bücher.
Im Weiteren kommt die Cape nun an die Gewichtsgrenze, mit den 3 x 12V / 4000mAh NiMh Akkus kommt sie auf 7430 gr. Da muss ich wohl auf einen Akku verzichten, mit 2 Akkus liegt sie mit 6740 gr gut im Wasser. Eine Möglichkeit wären natürlich LiPo’s, aber die sind mir einfach nicht sympathisch!
Nach intensiver Suche habe ich eine undichte Stelle gefunden. Im vorderen Bereich war an einem schwer zugänglichen Ort das Deck nicht sauber verklebt und auch bei einer Ankertasche war eine kleine undichte Stelle. Diese wurden wegen der schwierigen Lage mit einem Dichtspray behandelt. Die darauf folgenden Testfahrten ergaben nun gute Ergebnisse.
Weniger erfreulich waren elektronische Probleme, ein defekter Kettenmischer und ein defekter Motor des Bugstrahlruders der gleichzeitig den Regler mit ins Elend riss! Mit dem Ersatz dieser Komponenten habe ich auch gleich den geplanten Umbau auf die neue Futaba T14 Steuerung gemacht. Diese erlaubt ein feinfühligeres Steuerverhalten dank einstellbaren Exponentialkurven und Abgleich/Begrenzung der Aussteuerung und Servowege.
Bei einem weiteren Testlauf zeigten sich noch Schwachstellen bei den Motor-Kupplungen und der Lage der Flaps. Die Kupplungen wurden ersetzt und die Flaps etwas höher montiert, so dass sie in Neutralstellung nicht mehr im Schraubenstrom liegen.
Dann hat auch noch die Lenzpumpe den Geist aufgegeben und ich musste eine neue (hoffentlich dauerhaftere) einbauen, denn allen Abdichtmassnahmen zum Trotz dringt immer noch etwas Wasser ein.
.