ÜBUNGS-SCHLEPPER "WIESEL"


Dieses Boot habe ich als „Versuchsträger“ aus dem Nachlass von Rolf Haldemann erworben. Es war wohl schon jahrelang nicht mehr bewegt worden und entsprechend drehte der Motor kaum noch, da das Fett im Stevenrohr völlig eingedickt war. Es dient mir als Trainingsmodell, an dem ich meine Bautechnik zu verbessern versuche und auch neue technische Einrichtungen wie Kräne, Querstromruder und anderes ausprobieren möchte. Bis auf den Rumpf und das Deck habe ich daher alles entfernt, inklusive Antrieb und Fernsteuerung. Da die neuen Einbauten wohl auch schwerer sein werden als bisher, musste ich auch den fest vergossenen Ballast brachial entfernen und kann somit gleich auch noch üben, wie man mit Epoxy und Glasfasergewebe umgeht.
Ein vorläufiges Ziel ist es, dieses Boot so auszurüsten, dass es befähigt ist, ein liegengebliebenes Boot mittels Kran ins Schlepptau zu nehmen und an Land zurückzubringen. Die Idee dazu kam mir bei einem Klubfahren am Hallwilersee, als bei einem Kollegen das Boot schlapp machte und die Bemühungen, es mit einem anderen Boot zurück zu stossen nicht wirklich funktionierten. Auch das heimschleppen eines Segelboots bei Flaute wäre so ein möglicher Fall für eine Rettungsaktion. Ob ich das so wie geplant verwirklichen kann wird sich zeigen!
Der etwas bescheuerte Arbeitsnahme „HOLMIHEI“ kommt von „hohl mich Heim“, hoffentlich fällt mir noch ein besserer Name ein, wenn das Boot dann mal auch wirklich seinen Zweck erfüllt (Nachtrag: wie weiter hinten zu lesen, wurde dieses Ziel bisher verfehlt, aber da das Boot so "wieselflink" ist, habe ich es nun in WIESEL umgetauft).
Die Zerstörung
Bevor etwas Neues entstehen kann muss oft zuerst etwas Altes zerstört werden!
Und so sieht das dann aus ...
Das "Ausgangsprodukt"

... und was davon übrig bleibt ...
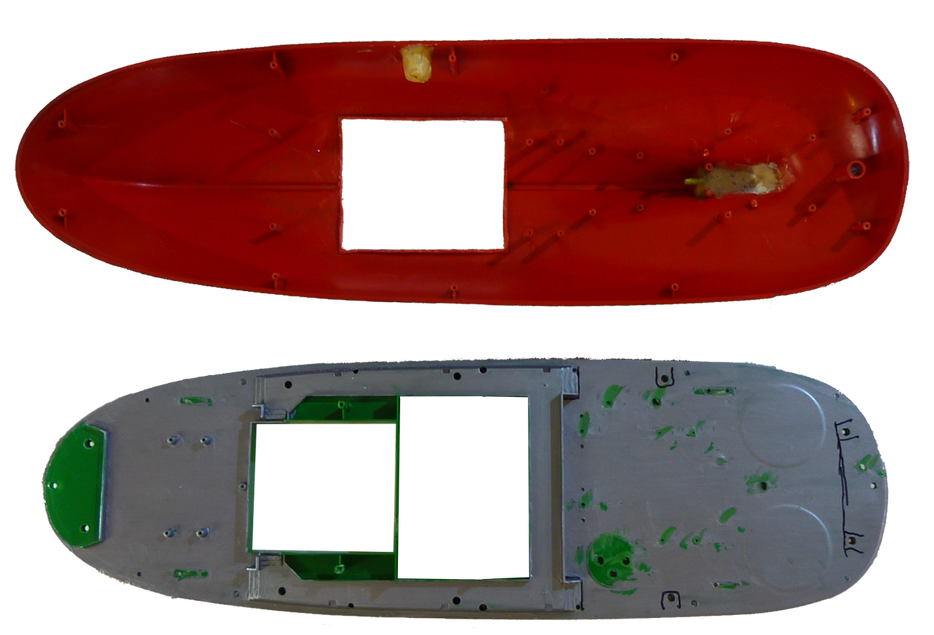
ausgehöhlter Rumpf und abgeräumtes Deck
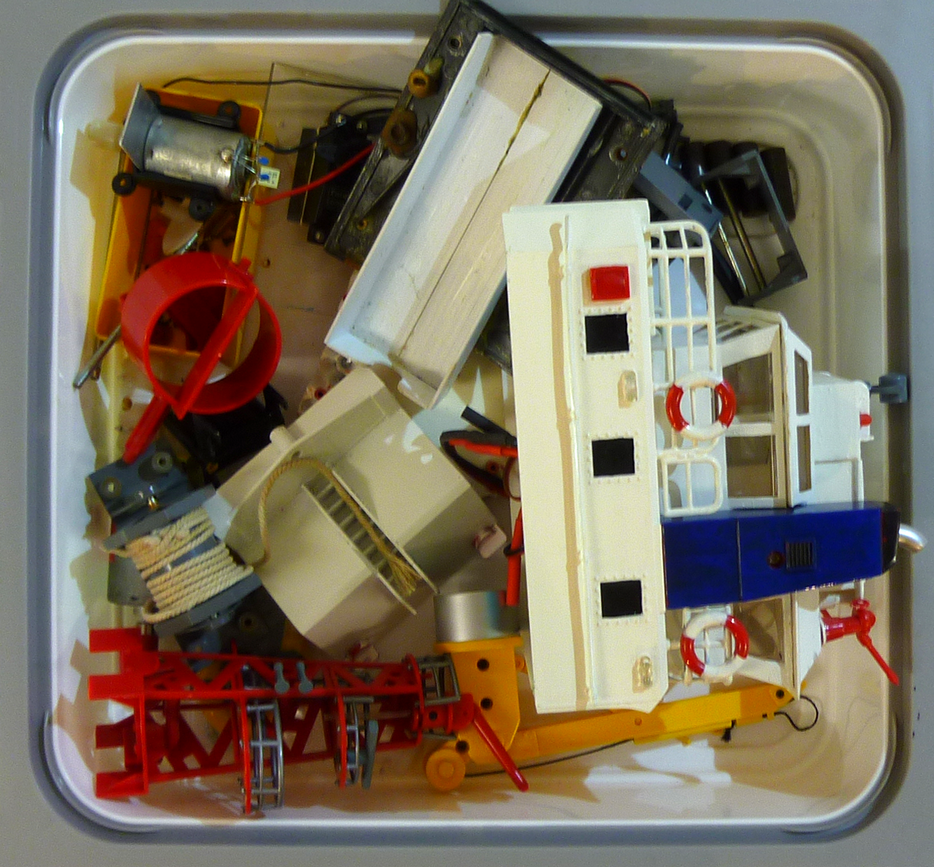
und der ganze Kleinkram, der so ein Boot "bevölkert"
Der Neuaufbau
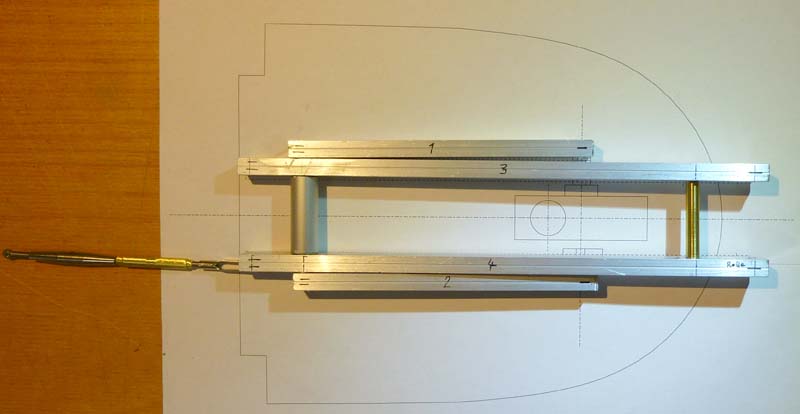
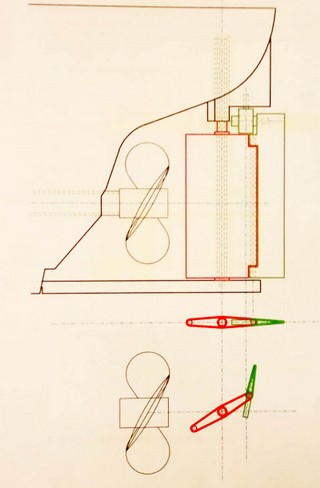
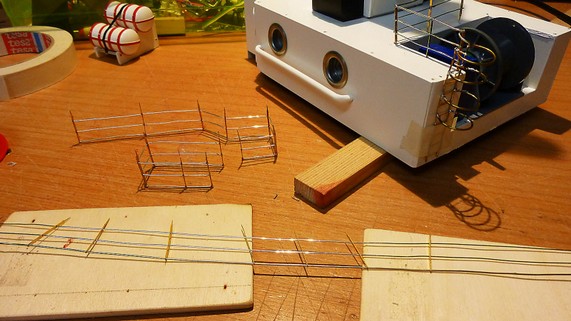
Zuerst habe ich mir Gedanken über die Art des Krans gemacht, der auf den Schlepper soll. Nach einigen Versuchen habe ich mich für eine etwas ungewöhnliche Konstruktion entschieden. Es war für den korrekten Bewegungsablauf notwendig, die Geometrie der Konstruktion im CAD aufzuzeichnen.
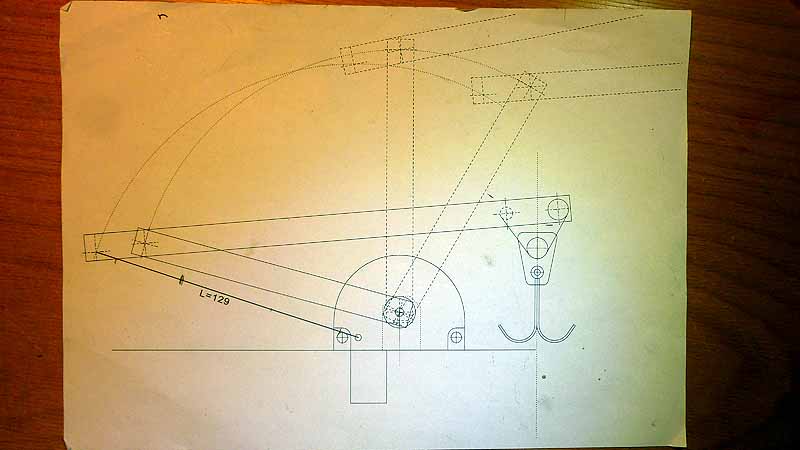
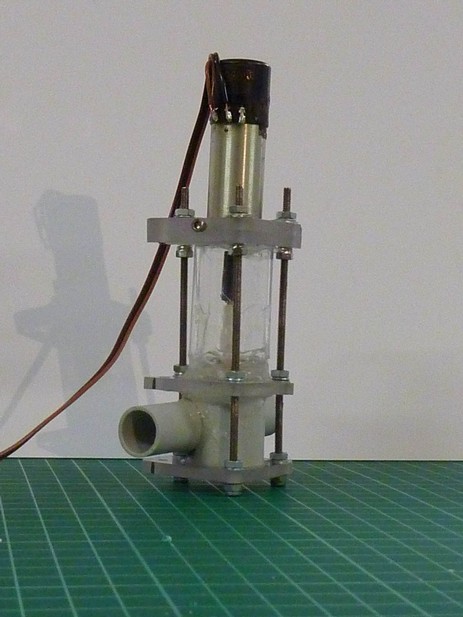
Mittels eines Prototyps wurde die Funktion überprüft.
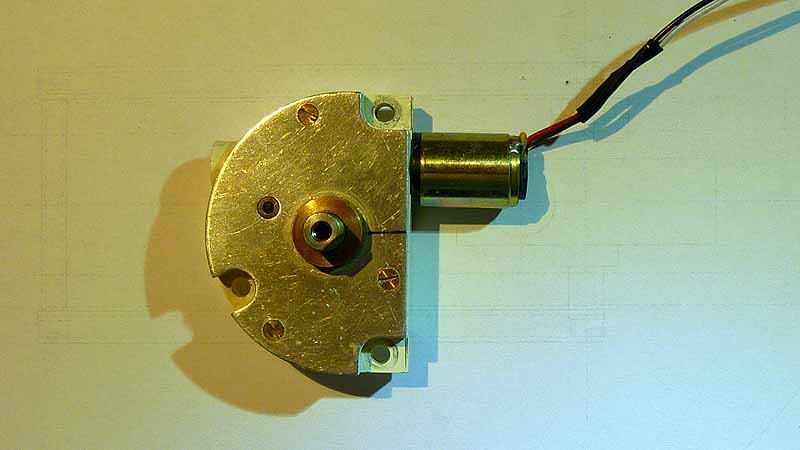
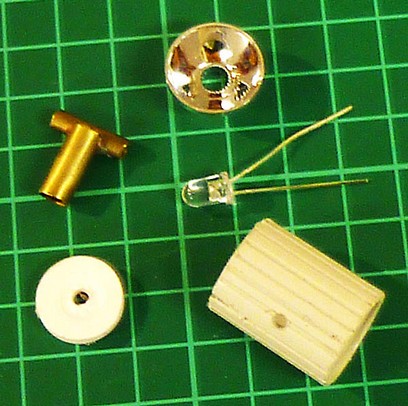
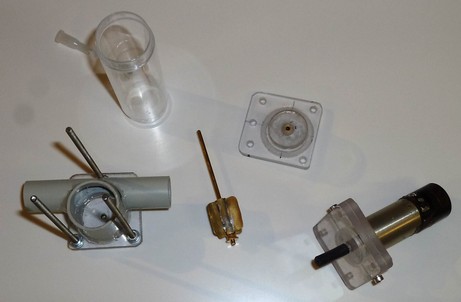
Im „Fundus“ fand ich auch einen passenden Antrieb für den Arm.
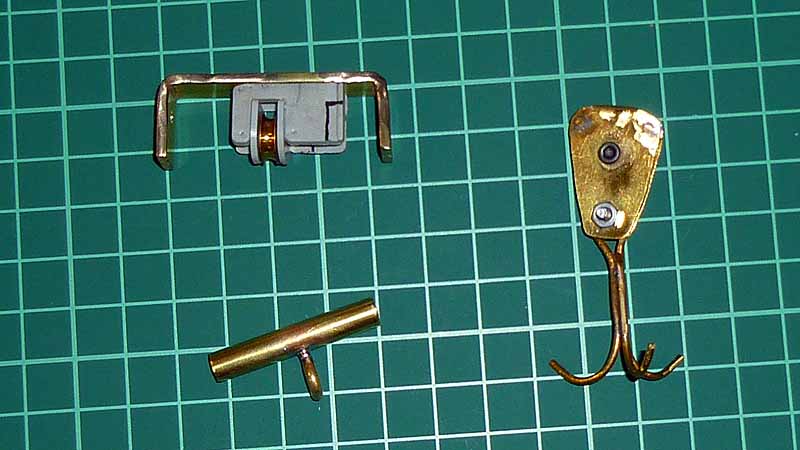
Einige Teile aus Messing, die ich schon mal zusammen gezimmert habe.
Damit die Flexibilität des Schleppers erhalten bleibt, baue ich den Kran auf eine auswechselbare Platte. Falls sich der Kran so nicht bewährt, kann ich einfach die Platte tauschen und eine andere Konstruktion einsetzen.

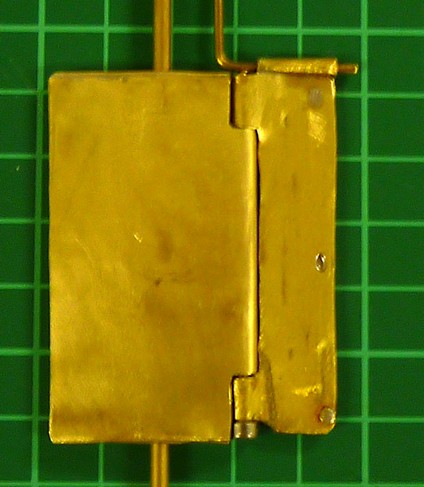
..und so sieht der Kran dann im eingezogenen Zustand aus ..

… und so im ausgefahrenen Zustand.

Die bisherigen Aufbauten habe ich ohne Plan „freihand“ gebaut, aber es sind wohl eher ziemlich unvollkommene Übungsstücke geworden. Also noch viel üben, dafür mache ich das ja!
Ein Scheinwerfer entsteht
Glücklicherweise habe ich von Anfang an alle Aufbauten – inklusive Kran – so gemacht, dass sie einfach ausgetauscht werden können. So kann ich verschiedene „Designs“ und Materialien am gleichen Grundmodell ausprobieren, was ja auch der Sinn dieses Projektes ist. Die momentane Ausführung entspricht damit etwa dem Stand „1. Lehrjahr“ L.
Die ganzen Deckaufbauten sind nun soweit fertiggestellt. Da alles modular aufgebaut ist können die Module später mit hoffentlich besser gebauten Teilen ausgetauscht werden.

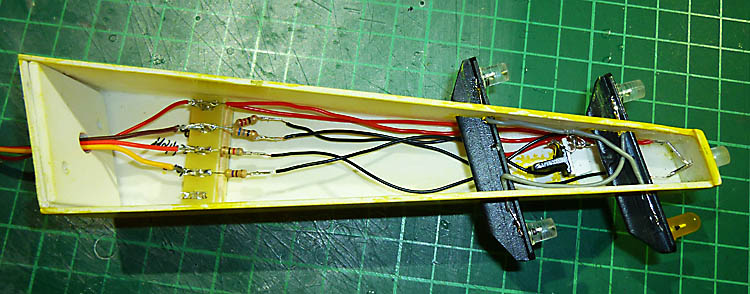
Die Elektrik ist im Aufbau auch schon enthalten :
- Innenbeleuchtung
- Scheinwerfer vorne (Eigenbau) und hinten (aus der Rappelkiste)
- Anzeigen im Führerstand (3.6V(grün) und 12V(rot) Power EIN, Kranausleger AUF/AB rot/grün, Kranhaken AUF/AB grün/rot)
- Am Mast oben Rundumlicht weiss, Funkellicht weiss, Manövrierbehinderung rot/weiss/rot senkrecht
- Seitliche Positionslichter rot/grün
Nun aber möchte ich mit dem „Unterbau“, sprich mit dem Rumpf und dann speziell mit dem Antrieb befassen.
Als nächstes habe ich die alte, marode Antriebswelle mit einem selbst gemachten „Stevenrohr-Bohrer“ ausgebohrt um Platz für eine neue Raböschwelle mit 45er Messingpropeller zu machen. Dazu musste auch der Rumpf etwas abgeändert werden, damit Propeller und Beckerruder Platz haben.

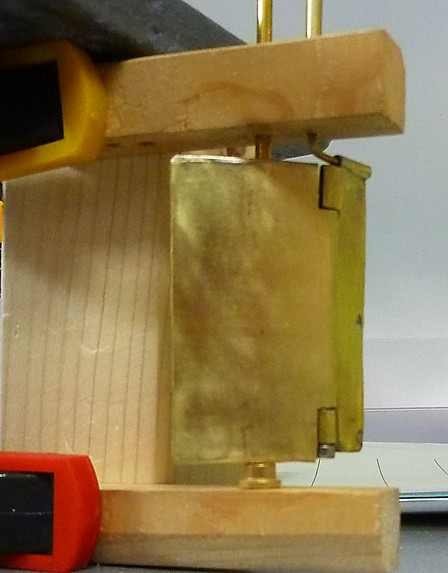
Aus Installationsröhrchen, Acrylglas, Messingstangen und -blech sowie einem Verpackungsröhrchen und dem Sprühkopf eines Nasensprays (!) entsteht das Teil.
Dank Verwendung von transparentem Material sehe ich sofort, wenn es undichte Stellen gibt. Nach einigen Nachbesserungen hat das Ruder den Dichtetest bestanden, 20 Minuten bei Vollast bis zum Motorflansch eingetaucht.
Sieht ziemlich gebastelt aus, aber es wird ja unter Deck eingebaut und ist somit später unsichtbar.
Mein erster Laminierjob ist mehr schlecht als recht herausgekommen, da sich das „gestopfte Loch“ aber im Boden befindet, fällt es nicht so auf und nach dem Schmirgeln, Spachteln und Lackieren sollte man eigentlich nichts mehr sehen. Schmirgeln und Spachteln sind nicht gerade die beliebtesten Tätigkeiten, aber was sein muss – muss sein.
Probehalber habe ich mal alles was in das Schiff kommt auf die Waage gestellt und meine Befürchtung hat sich bewahrheitet …. Übergewicht!! Original hatte der Schlepper ein Gesamtgewicht von 2,9 kg, nun komme ich auf rund 3,6 kg. Also muss ich abspecken (z.B. kleinerer Akku) oder ich muss zusätzliches Volumen am Rumpf bereitstellen. Da muss ich erst mal gründlich überlegen, wie weiter!
Aus Fehlern lernt man!!
Und gelernt habe ich viel – vor allem, wie man es nicht machen sollte!
Nachdem ich das fertig gebaute Deck mit den Auf- und Einbauten mit dem Rumpf „verheiraten“ wollte stellte sich heraus, dass sich da einiges in die Quere kommt. Also wieder umbauen bis alles passt und dann zusammenbauen … und dann die Katastrophe. Ein Schwimmtest in der Wanne offenbarte das niederschmetternde Ergebnis – der Pot kippte einfach um! Der Kran und die zu massiven Aufbauten waren einfach zu viel.
Dank modularem Bau konnte ich als erstes den Kran entfernen. Damit war das Schiffchen wieder recht stabil aber immer noch etwas tief im Wasser. Damit habe ich dann auch einen ersten Test auf dem Halblitersee, -äh exgüsi .. dem Hallwilersee natürlich - gemacht. Immerhin ist der Schlepper nicht abgesoffen, obwohl er immer noch zu tief im Wasser liegt.

Nun werden die Aufbauten neu in „Leichtbauweise“ aus 1mm Polystyrol gefertigt und statt dem Kran kommt vorläufig nur noch eine einfache Winde zum Einsatz.
Den Mast habe ich beibehalten, nach unten verlängert und gleich als Betätigung für die Verriegelung der Aufbauten eingesetzt.
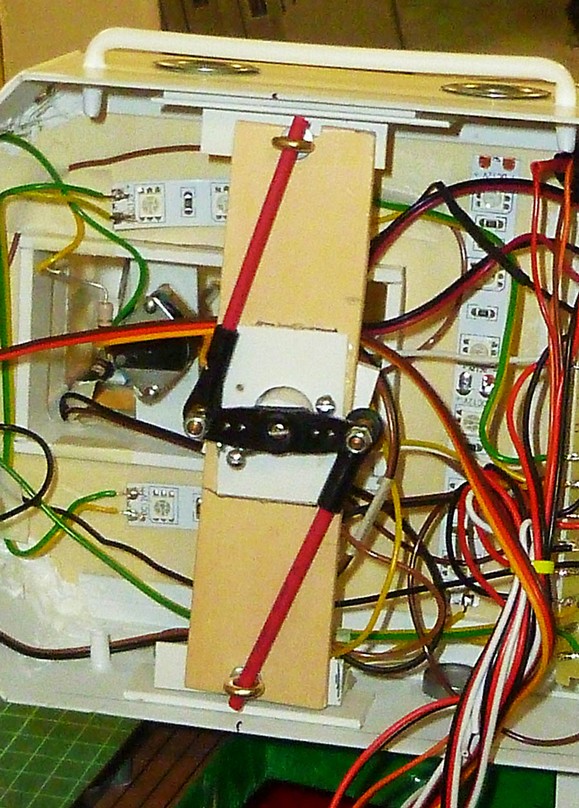
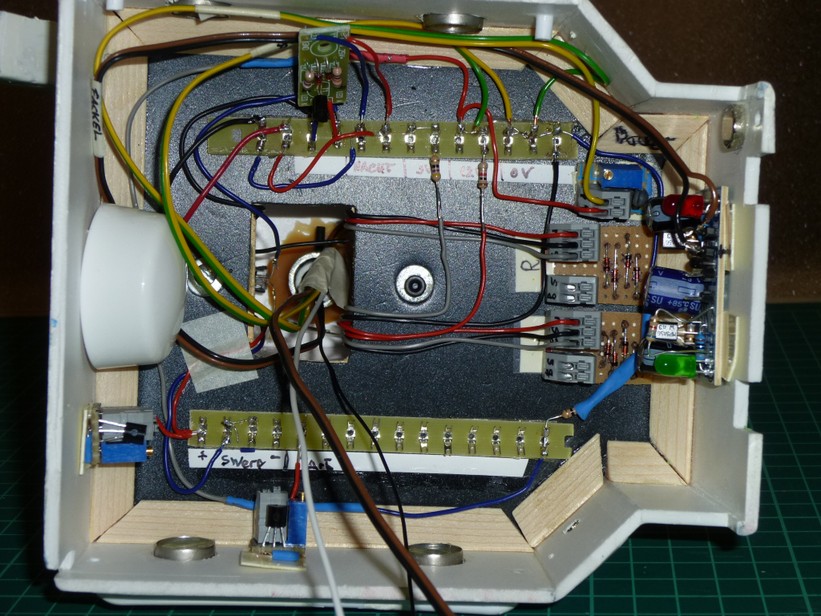
Gleichzeitig habe ich jetzt auch die Fernsteuer-Empfänger und Schaltmodule steckbar gemacht, so dass die Komponenten in verschiedenen Schiffen verwendet werden können.
Der Innenausbau nun mit Halterung für den Akku so gemacht, dass er leicht entnommen werden kann.


Nun noch einige „Feinheiten“ an den Aufbauten, die Reling im Massstab 1:50, um sieben Ecken herum hat meine Nerven ziemlich strapaziert.

Das selbst gebaute Beckerruder ist sehr effizient, das Schiff dreht praktisch an Ort, das Eigenbau- Querstrahlruder funktioniert ebenfalls gut, es ist aber eigentlich nicht nötig.
So sieht das vorläufige Ergenis aus, .... aber irgendwann wird wieder umgebaut.

Der Test im Bassin hat erfreulicherweise auch gezeigt, dass sowohl das Querstromruder als auch das Stevenrohr und das Deck wasserdicht sind, trotz wildem aufschäumen beim Gasgeben!
Allerdings ist das Schiff übermotorisiert und geht ab wie ein Wiesel! So ist es kaum vernünftig steuerbar. Da ich bei der alten 40MHz F14 Funke die Kennlinie des Reglers nicht verändern kann, muss ich andere Massnahmen ergreifen.
Ein Test im Becken zeigte, dass mit 6V statt 12V das Regelverhalten besser ist und trotzdem noch genug Power vorhanden ist. Ich habe daher das 12V-Akkupack aufgeteilt in 2x6V, die ich über einen Adapterstecker parallel schalte. Allerdings musste ich nun noch einen kleinen Zusatzakku für einige LED-Anzeigen die mindestens 10V benötigen (3 AA-Zellen in Serie zum Hauptakku).
Nun ist der Schlepper vorläufig einsatzbereit, allerdings nicht so wie ursprünglich vorgesehen.
----------------------------------------------------------------------------------------------------------------------------------------------
UPDATE Juli 2019
Da der Schlepper im oben beschriebenen Zustand für nichts "gescheites" zu gebrauchen war, habe ich mich wieder an die Arbeit gemacht um eines Tages doch noch nützliches Gefährt daraus zu machen :-))
Das Steuerhaus inklusive Mast musste weichen, zudem habe ich auch die Elektrik und Fernsteuerung umgebaut.
ELEKTRIK
Es zeigte sich, dass mit dem nur noch 5-zelligen Akku kein sicherer Betrieb möglich war, der Empfänger hatte immer wieder Aussetzter. Ich verwende neu 2 x 6 Zellen Eneloop-pro AA mit je 2500mAh. Das hat sich als vollständig genügend für einen normalen Fahrtag herausgestellt. Im Bedarfsfall kann man zudem zur Not auch gewöhnliche Alkali-Batterien verwenden.
FERNSTEUERUNG
Zur Vereinheitlichung habe ich die Wiesel nun auch auf 2,4GHz umgestellt und kann damit die gleichen Sender und Empfänger wie für die Cape St. George verwenden. Die Seabex und die neuen Schiffe werde ich gleich ausrüsten, und da ich Empfänger und Schaltmodule steckbar gemacht habe muss ich nicht alles mehrfach anschaffen.
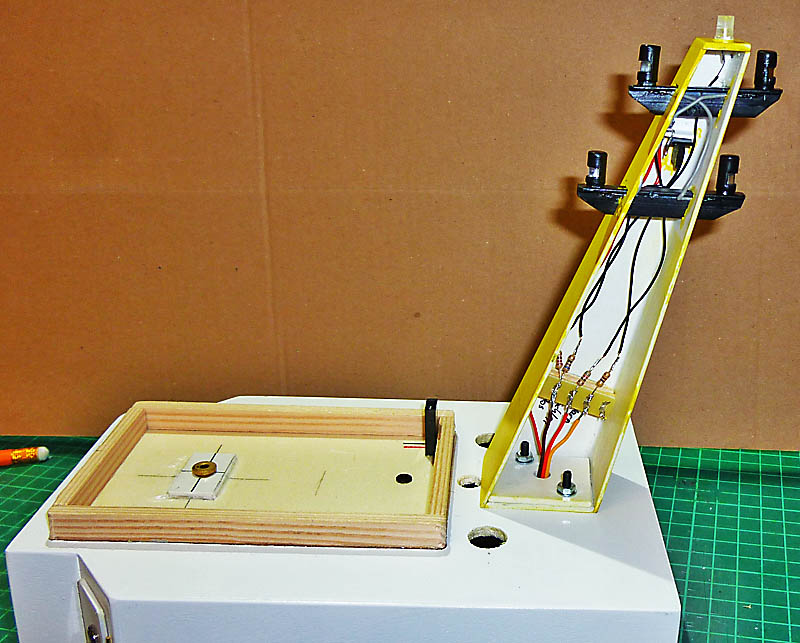
AUFBAUTEN
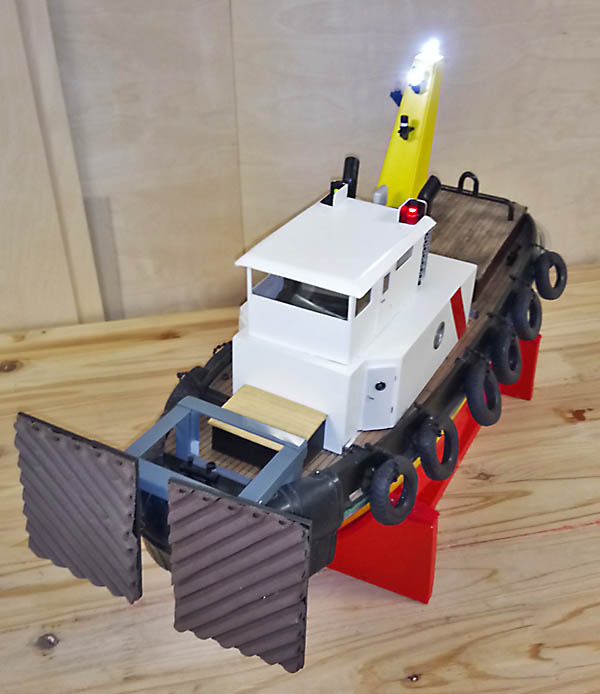
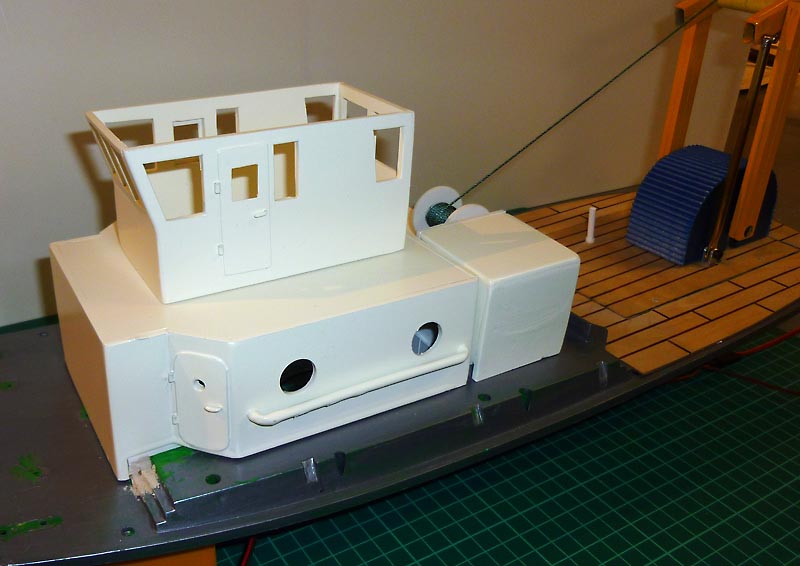
Ein weiterer Anlauf, die Wiesel als Bergungs-Schlepper einsetzen zu können! Das Steuerhaus wurde neu gebaut und mit einer WiFi-fähigen Action-Cam bestückt, die auch noch drehbar ist. Dies sollte die "Zielgenauigkeit" beim Anpeilen eines Havaristen verbessern.
Der Mast wurde rein zu Übungszwecken neu gebaut! Das zentrale Element des Umbaus sind aber die federnd montierten und gepolsterten Schubplatten vorne, mit denen der Havarist schonend an Land gestossen werden soll. Der Echt-Test ist allerdings noch ausstehend. Auch die Reichweite der WiFi-Verbindung für die Übermittlung der Bilder ans Handy könnte etwas knapp sein.
In Planung ist noch ein absenkbarer Enterhaken auf der hinteren Montageplattform.

Die Kamera wurde durch ein 4k WiFi-Modell ersetzt